Snelheid van het geluid
Wat houdt deze proef in?
Als hoofdproject zal Stijn samen met mij een proefopstelling maken om de snelheid van het geluid te meten. De opstelling moet aan volgende eisen voldoen:
- De opstelling moet bestand zijn tegen vloeistoffen.
- Een aansluiting om de buis vacuüm te zuigen.
- De mogelijkheid om invloed temperatuur te meten.
-Kiefer Moyaert
Snelheid van het geluid
Hydrofoon.
1. Inhoudstafel
1. Inhoudstafel2. Inleiding
3. Piëzo-elektrisch effect
3.1 Moleculestructuur 3.2 Geometrie van het molecuul 3.3 Roosterstructuur 3.4 Spanning 4. Microfoon 5. Bibliografie Download PDF
2. Inleiding
Om het geluid te kunnen registreren hebben we een geluidssensor nodig. Deze is liefst ook bestand tegen water, aangezien we graag de geluidssnelheid doorheen water willen meten. We hebben dus nood aan een waterdichte microfoon, ook wel hydrofoon genoemd.
Na wat opzoekwerk kwamen we er al snel achter dat een hydrofoon zeer duur is, en niet binnen het budget past. Aangezien we niet de meest kwaliteitsvolle hydrofoon nodig hebben, hebben we besloten om zelf een hydrofoon te maken.
3. Piëzo-elektrisch effect
Sommige materialen bezitten een bijzondere eigenschap, namelijk dat ze mechanische spanning omzetten in een elektrische spanning en omgekeerd. Dit lijkt wel magie, maar eigenlijk is dit zeer makkelijk te verklaren.
3.1 Moleculestructuur
Kwarts heeft als chemische formule SiO2. Een kwartsmolecule bestaat dus uit 1 silicium atoom en 2 zuurstof atomen. We gaan na welke binding deze atomen vormen.
EN(Si)= 1,9
EN(O)=3,44
∆EN=3,44-1,9=1.54
Aangezien ΔEN zich tussen 0,4 en 1,66 bevinden, kunnen we al zeker zeggen dat er een covalente binding zal gevormd worden.
Aangezien zuurstof een grotere elektronegatieve waarde geeft dan silicium, zal deze de gebonden elektronenparen meer naar zich toe trekken. Hierdoor krijgt het zuurstofatoom een gedeeltelijk negatieve lading en het siliciumatoom een gedeeltelijk positieve lading.
Echter zijn we nog niet zeker of dit een polaire of apolaire binding is.
3.2 Geometrie van het molecuul
Om dit te bepalen, moeten we kijken naar de geometrie van de molecule. Dit kunnen we bepalen aan de hand van het sterisch getal, dat we kunnen bepalen uit de Lewisstructuur. De Lewisstructuur voor siliciumdioxide ziet er als volgt uit.
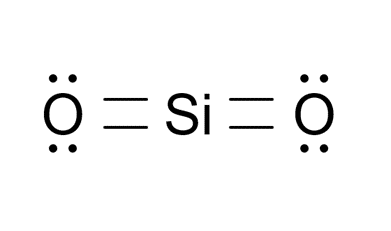
FIGUUR 0:1 Lewisstructuur van SiO2
Het sterisch getal bepalen we door de som te maken van het aantal bindingspartners en het aantal vrije elektronenparen. In deze molecule is het sterisch getal van silicium dus gelijk aan 2, en dat van zuurstof is gelijk aan 3.
Dit sterisch getal bepaalt welke soort hybridisatie deze atomen zullen ondergaan. We zijn niet zozeer geïnteresseerd in het type binding dat zal ontstaan, maar enkel in de geometrische plaats waar deze bindingen zullen plaatsvinden. Hierdoor volstaat het om enkel het sterisch getal van silicium te bepalen. Aangezien het sterisch getal van silicium dus 2 bedraagt, zal het molecuul lineair zijn.
In vorig punt hebben we bepaald dat zuurstof de gebonden elektronenparen meer naar zich toe zal trekken dan silicium. Echter gebeurt dit bij beide zuurstofatomen, die dus lineair gebonden zijn aan het siliciumatoom. Er ontstaat een positieve ladingswolk rond het atoom silicium en er ontstaat een negatieve ladingswolk, waarvan het zwaartepunt door de lineaire structuur samenvalt met het zwaartepunt van de positieve wolk. Daardoor heffen ze elkaar op en is de molecule apolair.
Het piëzo-elektrisch effect valt hiermee dus niet te verklaren. We kunnen het effect echter wel verklaren wanneer we kijken naar hoe meerdere moleculen zich zullen gedragen ten opzichte van elkaar.
3.3 Roosterstructuur
Wanneer men meerdere SiO2-moleculen samenbrengt, dan zullen deze bindingen met elkaar aangaan en een rooster vormen. Een siliciumatoom zal zich binden met 4 zuurstofatomen en een zuurstofatoom telkens met 2 siliciumatomen.
Experimenteel is bepaald dat het rooster van kwarts er als volgt uitziet:
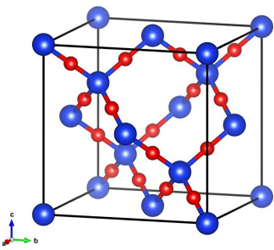
FIGUUR 0:2 Atoomstructuur van kwarts
FIGUUR 0:3 Kwarts
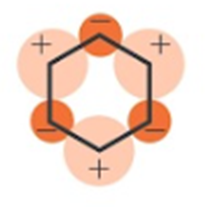
Echter is dit materiaal nog geen piëzomateriaal. Om het effect te verkrijgen, moeten de atomen als volgt georiënteerd liggen in het snijvlak:
In deze afbeelding stellen de gedeeltelijk negatief geladen atomen de zuurstofatomen voor en de gedeeltelijk positief geladen de siliciumatomen.
We zullen het effect verklaren aan de hand van ladingswolken. We zien dat in deze toestand de zwaartepunten van de ladingswolken wegens de symmetrie op elkaar liggen. In deze situatie is de stof dus nog steeds apolair.
Wanneer we echter een mechanische spanning uitoefenen op dit materiaal, dan zal dit materiaal vervormen (zie figuur 0:4). Als een materiaal vervormt, dan verplaatsen de atomen in dat materiaal zich ook ten opzichte van elkaar. Dit heeft als gevolg dat de ladingswolken ook veranderen. Door het verschuiven van de atomen krijgen we aan de ene kant van de ringstructuur relatief gezien meer positieve lading en aan de andere kant van de ringstructuur relatief gezien meer negatieve lading. De ladingswolken gaan dus wegens de asymmetrie elkaar niet meer opheffen. Daardoor verandert de stof naar een polaire stof.
Dat de zwaartepunten van de ladingswolken niet meer op elkaar liggen, wil zeggen dat er zich meer elektronen aan de ene kant van het materiaal bevinden dan aan de andere kant, waardoor er een ladingsverschil is tussen beide kanten van het materiaal. Dit ladingsverschil brengt een elektrische spanning met zich mee die over het materiaal staat. Dit is dus het piëzo-elektrisch effect.
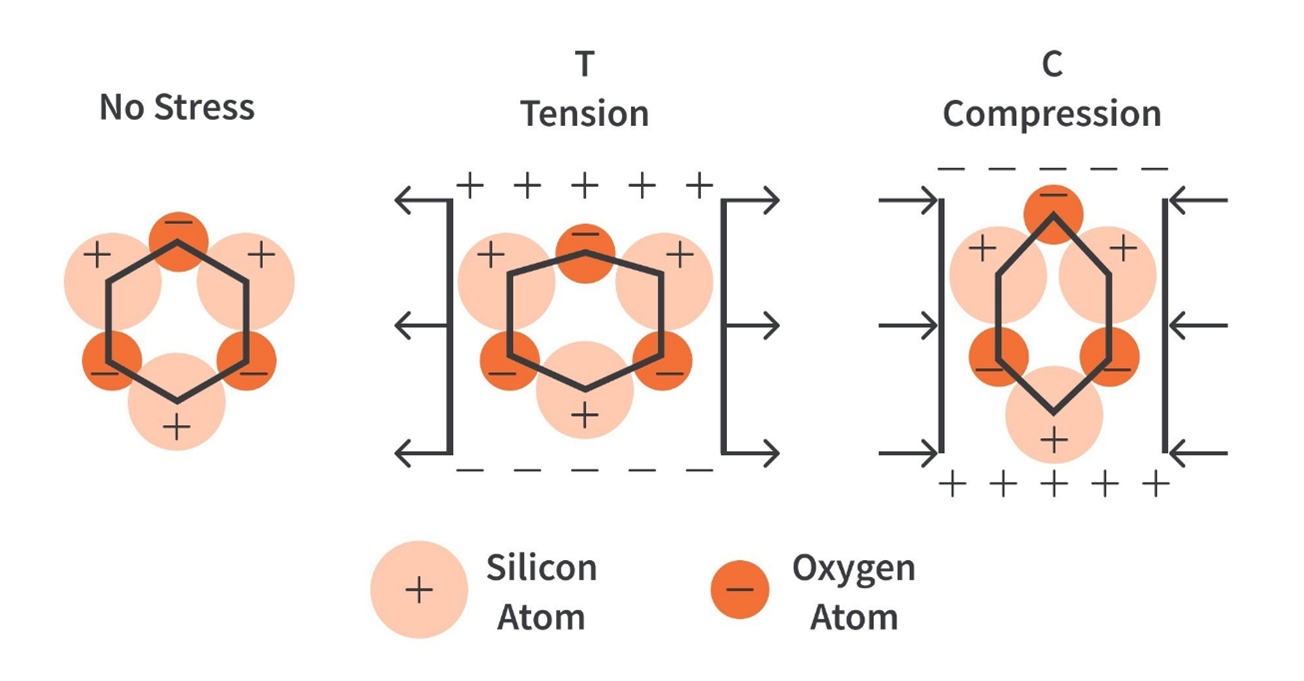
FIGUUR 0:4 Effect van mechanische spanning
Op bovenstaande afbeelding kunnen we ook waarnemen dat de positie van de positieve en negatieve pool van de elektrische spanning afhankelijk zijn van de soort spanning die wordt uitgeoefend op het materiaal. Als we van drukspanning naar trekspanning gaan, dan zal de polariteit van de elektrische spanning dus ook veranderen.
Wanneer we de mechanische spanning vergroten, dan zien we dat het materiaal meer zal vervormen en de zwaartepunten van de ladingswolken verder uit elkaar zullen liggen. Hierdoor zal de elektrische spanning dus ook vergroten. Als we de mechanische spanning echter verlagen, dan liggen de zwaartepunten dichter bij elkaar. Dit zorgt ervoor dat de elektrische spanning kleiner wordt. We kunnen hieruit dus besluiten dat de elektrische spanning rechtevenredig is met de mechanische spanning.
4. Microfoon
Nu we weten wat het piëzo-elektrisch effect is, kunnen we dit gaan toepassen. We weten dat geluid een drukgolf is die zich longitudinaal voortplant. Wanneer een geluidsgolf invalt op een stukje piëzo-materiaal, zal dit een kracht uitoefenen op het materiaal. Hierdoor zal het vervormen, waardoor er dus een elektrische spanning gegenereerd zal worden. Deze spanning kunnen we vervolgens uitlezen met een microcontroller.
Aangezien de drukgolf de kracht veroorzaakt, die vervolgens wordt omgezet in spanning, zal de amplitude van deze spanning rechtevenredig zijn met deze van de geluidsgolf. Dit is de principiële werking van een microfoon.
Wanneer we dit echter zouden uittesten, dan horen we dat er veel ruis op het signaal zal zitten. Deze ruis komt door invallende straling van de omgeving. Deze straling is afkomstig van andere apparaten, zoals bijvoorbeeld een gsm, een microgolfoven, het elektriciteitsnet …
Deze moeten we dus wegwerken, en dit kan aan de hand van een elektrische schakeling. Dit wordt in een later hoofdstuk behandeld.
5. Bibliografie
Anita Bongaerts, I. D. (2022). Waco chemie 4 Leerboek doorstroomfinaliteit 1u + 2u. Plantyn.
Mould, S. (2019, Mei 16). Piezoelectricity - why hitting crystals makes electricity. Opgehaald van Youtube: https://www.youtube.com/watch?v=wcJXA8IqYl8
-Kiefer Moyaert
Snelheid van het geluid
GIP verslag.
1. Inhoudstafel
1. Inhoudstafel2. Onderzoeksvraag / hypothese
3. Voorkennis
3.1. Geluidssnelheid
3.2. Luchtdruk
3.3. Soorten manometers
4. Opstelling
4.1. Principe
4.2. Box
4.3. Schuifsysteem
4.4. Luidsprekersysteem
4.5. Drukregeling
4.6. Elektrische aansluitschema's
4.6.1. Driefase pomp
4.6.2. ESP32
4.7. Opgelopen problemen
4.7.1. Driefase pomp
4.7.2. Ontladen condensatoren
4.7.3. DC-motor
4.7.4. ESP32
5. Meting en resultaten
5.1. Geluidssnelheid onder atmosferische druk
5.2. Geluidssnelheid bij variërende druk
6. Berekeningen
6.1. Bepalen van geluidssnelheid
7. Vaststellingen en besluit
8. Reflectie
Download PDF
2. Onderzoeksvraag / hypothese
Wat is de theoretische geluidssnelheid? Wat heeft de luchtdruk als invloed?
3. Voorkennis
3.1. Geluidssnelheid
Uit de theorie in de les weten we dat geluidsgolven zich voortplanten door elk medium bij een constante temperatuur en met een constante snelheid. In sommige media verplaatst geluid zich sneller, wat afhankelijk is van de elasticiteit en dichtheid van het medium. Geluidsgolven gaan moeilijk over van het ene medium naar het andere medium met een hogere of lagere dichtheid.
We hebben geleerd dat de geluidssnelheid verschilt in gassen, vloeistoffen en vaste stoffen. In onze proef meten we alleen de geluidssnelheid in een gas bij variërende druk. De voortplanting van de geluidssnelheid gebeurt door middel van deeltjes: hoe minder deeltjes, hoe langzamer de geluidssnelheid.
De geluidssnelheid in gassen kun je bepalen met de volgende formule:
\(v = \sqrt{\frac{c_p\cdot p}{c_v\cdot ρ}}\)
Met:
cp: soortelijke warmte bij constante druk
cv: soortelijke warmte bij constant volume
p: druk van het gas
ρ: massadichtheid van het gas
In vloeistoffen wordt deze formule:
\(v = \sqrt{\frac Kρ}\)
Met:
K: compressiemodulus van de vloeistof
ρ: massadichtheid van de vloeistof
En bij vaste stoffen:
\(v=\sqrt{\frac Eρ}\)
Met:
E: elasticiteitsmodulus van de vaste stof
ρ: massadichtheid van de vaste stof
3.2. Luchtdruk
De luchtdruk is de kracht die de lucht uitoefent op voorwerpen, vloeistoffen en gassen in de aardatmosfeer. Deze druk ontstaat doordat lucht, beïnvloed door de zwaartekracht van de aarde, een bepaald gewicht heeft. Luchtdruk werkt in alle richtingen.
Luchtdruk wordt beïnvloed door verschillende factoren, waaronder:
Als je de luchtdruk vermindert, worden de deeltjes in de lucht beïnvloed door de verandering in druk. Hier zijn enkele effecten die kunnen optreden:
3.3. Soorten manometers
In onze proef gebruiken we een manometer als meetinstrument om de druk mee te meten. Er bestaan twee verschillende manometers: de U-vormige en de metaalmanometer.

Figuur 3 1 U-vormige manometer
Een eenvoudige manometer bestaat uit een U-vormige buis. De ene kant van de buis staat in contact met de atmosfeer en komt daarom overeen met atmosferische druk. De andere kant is verbonden met de druk die gemeten moet worden. De buis is gevuld met een vloeistof zoals kwik, ethanol of water. Wanneer de druk aan beide zijden gelijk is, bevinden de vloeistofoppervlakken zich op hetzelfde niveau. Als de te meten druk toeneemt, daalt de vloeistof aan die kant van de manometer.
De tweede soort manometer is een metaalmanomter, die bevat een metalen trommel met een veerkrachtige wand. Dit trommeltje wordt ingedrukt door de druk van het te meten gas. Wanneer het trommeltje wordt ingedrukt, verandert het van vorm, en deze vormverandering wordt omgezet in een meetuitslag. Een ander type metaalmanometer bevat een gebogen metalen buisje. Ook dit buisje zal van vorm veranderen door de druk van het gas, waardoor de meter uitslaat.
4. Opstelling
4.1. Principe
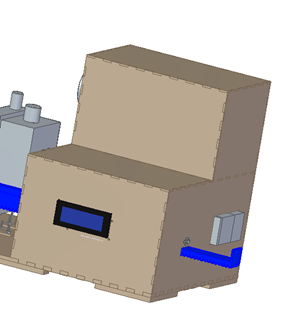
In dit onderdeel zal het principe van ons project duidelijk worden, hoe het systeem werkt en wat we er mee willen bereiken. Hieronder ziet u een afbeelding van het volledig systeem:

Figuur 4 1 Overzicht systeem
Al onze onderdelen zijn bevestigd aan een onderplaat met ofwel bouten en moeren ofwel met een tand-groef systeem. We hebben een paar grote onderdelen: de box, het schuifsysteem, het luidsprekersysteem. Wat ook opvalt aan de onderplaat is dat deze opgedeeld is in 3 delen. Dat komt doordat de lasercutter op school maar maximum platen met een lengte van 0.8m kan laseren. Het probleem is dat als we de drie delen van de onderplaat aan elkaar willen bevestigen, een tand- en groefsysteem waarschijnlijk niet sterk genoeg zal zijn om trillingen en trek- en drukkrachten te weerstaan. Voor de zekerheid hebben we nog verstevigingen gemaakt. Aan de onderkant van de onderplaat zijn kleinere mdf-platen bevestigd. Deze zorgen ervoor dat onze onderplaat boven het tafeloppervlak blijft, zodat er geen boutkoppen of bevestigingen over de tafel slepen en schade veroorzaken. Hieronder leggen we alle deelcomponenten uit.
4.2. Box
Figuur 4 2 Box
In dit deel van onze opstelling bevinden zich alle elektronische en elektrische componenten. De bedoeling van deze box is dat alles veilig en proper zit weggewerkt. Aan de buitenkant kunnen we de schakelaar bedienen die betrekking heeft tot de vacuümpomp. De LCD geeft weer wat de afstand is tussen de microfoon en de luidspreker en toont ons ook de geluidssnelheid. Aan de hand van de Rotary Encoder kunnen we de afstand regelen. Deze doet de motor draaien zodat de tandlat zich verplaatst. Deze begeeft zich ook half in de box. Aan de andere zijde van de box bevindt zich de manometer en de drukregelaar.
4.3. Schuifsysteem

Figuur 4 4 Schuifsysteem
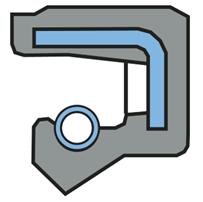
Figuur 4 3 Asafdichting type A
Hier ziet u het schuifsysteem die ervoor zorgt dat er geen lucht in of uit de buis kan terwijl de microfoon in en uit schuift. De microfoon bevindt zich aan het einde van de in- en uitschuifbare buis. Die is bevestigd aan de tandlat die we hierboven al hebben besproken. Aan de regenpijp hebben we een kopstuk gemonteerd zodat er aan het uiteinde een luchtdicht deksel zit. Het probleem is echter dat we een buis door het deksel moeten kunnen bewegen. Dit terwijl de regenpijp luchtdicht blijft. Na lang beraad hebben we de perfecte dichting daarvoor gevonden. Op de achtergrond van de foto bevindt er zich ook al een vacuümpomp die we zullen nodig hebben om de geluidssnelheid te bepalen bij variërende druk. Verder ziet u ook dat we de regenpijp hebben bevestigd op een paar houders die we zelf hebben ontworpen en die zijn geprint in PLA. De houders zorgen ervoor dat de buis op zijn plaats blijft en niet beweegt bij het uitzenden van de geluidstonen. Dit voor een optimaal resultaat.
4.4. Luidsprekersysteem

Figuur 4 5 Luidsprekersysteem
Dit is het luidsprekersysteem waarbij we onze luidspreker bevestigen in de regenpijp. We hebben twee plaatjes op maat laten laseren. Door de bouten aan te spannen houden we de luidspreker vast tussen de twee plaatjes. In de geprinte plaatjes zijn er op bepaalde plaatsen luchtgaten voorzien zodat we de lucht van tussen het deksel en de luidspreker ook kunnen wegzuigen. Als dat niet gebeurt, dan zuigt de vacuümpomp de luidspreker naar zichzelf toe. Dit systeem is tegelijkertijd ook een houder voor de luidspreker om die op de juiste plaat te behouden.
4.5. Drukregeling

Figuur 4 6 Vacuümpomp
In de proef zullen we de snelheid van het geluid meten op verschillende drukniveaus. Om de regenpijp vacuüm te zuigen hebben we een vacuümpomp nodig. Het probleem bij een vacuümpomp is dat deze steeds lucht weghaalt vanuit de afvoerbuis waardoor we geen constant drukniveau hebben om onze meeting uit te voeren. We kunnen dat simpelweg oplossen door tussen de vacuümpomp en de regenpijp een T-stuk met een kraantje op te plaatsen. Zo compenseert het de lucht, die erbij kan in de kraan, de luchtlekken in de regenpijp. Aan de hand van dat kraantje krijgen we een constante onderdruk die we zelf kunnen bepalen in de regenpijp.
De vacuümpomp werkt op driefase, wat het wel moeilijk maakt om het te voeden. In het labocomplex bevindt er zich maar één plaats waar het mogelijk is om dit toe te passen. Daarom hebben we op de driefasige motor een Steinmetzschakeling op toe gepast. De schakeling zorgt ervoor dat de motor 30% verlies heeft. Omdat we niet het volledige vermogen van de vacuümpomp nodig hebben, is het voor ons geen probleem om met 70% van de capaciteit te werken. Het is zeer belangrijk dat we niet te veel onderdruk creëren anders implodeert de regenpijp. We zullen gaan tot een onderdruk van maximaal 0.7 bar.

Figuur 4 7 Meting vacuümpomp
De vacuümpomp mocht, nadat de Steinmitchschakeling was toegepast, natuurlijk niet gewoon aangesloten worden op 230 V in het labocomplex. Voor de eerste test hebben we een scheidingstransformator tussen de bron en de belasting gestoken. Daarin wordt er 230 V omgezet naar 230 V, maar die specifieke transformator zorgt er voor dat wanneer er een fout optreedt in de gebouwde schakeling, dat niet het volledige elektriciteitsnet uitvalt. We kunnen hieruit concluderen dat de schakeling correct is en als gevolg heeft dat we de scheidingstransformator kunnen verwijderen.
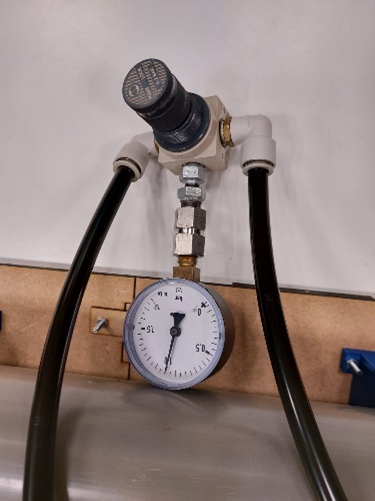
Figuur 4 8 Manometer en drukregelaar
Voor het systeem om alles luchtdicht af te sluiten hebben we al meerdere testen uitgevoerd. In de eerste test hebben we de vacuümpomp aangestoken en de drukregelaar opengedraaid zodat hij een beetje openstond. We wouden niet in één keer alle lucht uit de buis zuigen, omdat we wisten dat de minimale druk nog niet de druk is die de buis aankan. In overleg met de leerkracht fysica zijn we tot de conclusie gekomen dat we best tot een theoretische druk gaan van 0.7 bar. Tijdens die test merkten we dat na een bepaalde tijd er nog niks veranderd was op de manometer. Daaruit konden wij concluderen dat we met luchtlekken zaten. We willen dat oplossen door de mogelijke plaatsen dicht te maken met silicone. Na overleg met meerdere leerkrachten zijn we tot de conclusie gekomen om een kraantje op een T-stuk te plaatsen om zo de lucht lekken te compenseren

Figuur 4 9 Kraan en T-stuk
In een tweede test testen we het volledige luchtdichtheidssysteem met het T-stuk en de kraan. De bedoeling is dat we de kraan gedeeltelijk opendraaien totdat we de gewenste onderdruk hebben gecreëerd. Door de kraan open te draaien laten we een luchthoeveelheid toe die de luchtlekken van de regenpijp compenseert. De drukregelaar laten we weg doordat deze alleen werkt op overdruk en wij creëren onderdruk. We hebben de manometer dus rechtstreeks bevestigd op de regenpijp.
De conclusie van de test is dat de compensatie van de kraan te klein is om alle lucht lekken te compenseren, waardoor het niet mogelijk is om de buis vacuüm te trekken.
4.6. Elektrische aansluitschema's
4.6.1. Driefase pomp
De vacuümpomp wordt oorspronkelijk gevoed op driefase, maar dat hebben we niet ter beschikking. Om over te schakelen van driefase naar enkelfase maken we gebruik van de Steinmetzschakeling. Die schakeling is een condensator die tussen twee lijndraden geplaatst wordt. Deze zorgt voor de faseverschuiving die gewenst is om naar enkelfase over te schakelen.
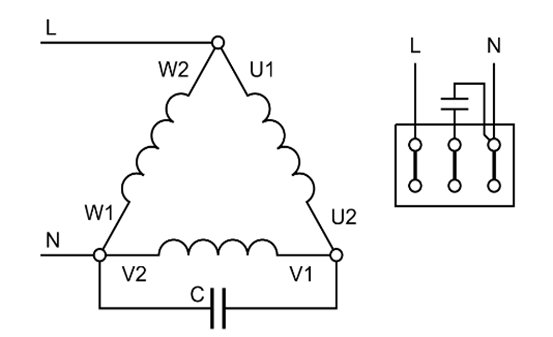
Figuur 4 10 Steinmetzschakeling
De motor was oorspronkelijk in ster geplaatst, waardoor we een lijnspanning hebben van 400 V. Deze is niet beschikbaar in het labocomplex. Daardoor hebben we de aansluiting van de vacuümpomp veranderd naar een driehoekschakeling. Zo hebben we 230 V op iedere lijndraad.
Aan de hand van volgende formule kunnen we de capaciteit van de condensatoren bepalen.
\(C = \frac{P}{\pi \cdot \sqrt 3 \cdot f \cdot u^2} = \frac{0.12 \cdot 10^3}{\pi \cdot \sqrt 3 \cdot 50 \cdot 230^2} = 25,01 µF\)
Tussen de vacuümpomp en de voeding hebben we een motorbeveiligingsschakelaar geplaatst. Deze dient als beveiliging voor de windingen van de spoel in de vacuümpomp. Voor het gemak hebben we in het begin van de schakeling een schakelaar geplaatst zodat wanneer we een andere meting uitvoeren waarbij de vacuümpomp niet nodig is, de pomp geen storend geluid maakt.

Figuur 4 11 Motorbeveiligingsschakelaar
Een motorbeveiligingsschakelaar is een thermisch-magnetische controle relais. Deze zal de voeding naar de vacuümpomp onderbreken wanneer er een kortsluiting of een overbelasting optreedt in de schakeling. Het bevat ook een thermische afschakelspoel die zorgt voor de bescherming van de motorwikkelingen en een elektromagnetische afschakelspoel.
We verkrijgen dus volgend elektrisch schema:
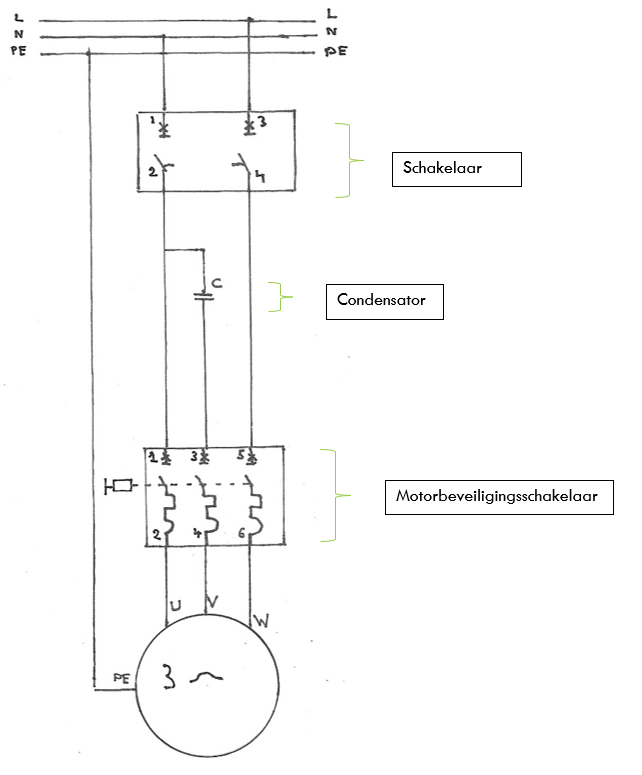
Figuur 4 12 Elektrisch schema vacuümpomp
4.6.2. ESP32
De ESP-32 is een microcontroller die in deze proef voornamelijk wordt gebruikt voor gegevensverwerking en het aansturen van verschillende componenten. We hebben specifiek voor de ESP-32 gekozen vanwege de mogelijkheid om een blokgolf te genereren met een gewenste frequentie. Dit is belangrijk omdat we de resonantiefrequentie van de luidspreker zo nauwkeurig mogelijk willen benaderen.
Naast deze microcontroller hebben we ook een LCD, LIDAR, motor en rotary encoder nodig. Deze componenten worden gebruikt om het experiment te bedienen en waren vrij eenvoudig aan te sluiten dankzij bestaande bibliotheken. Tot slot willen we Jerke bedanken voor het delen van de code die wordt gebruikt om de LIDAR aan te sturen.
Hieronder staan de aansluitschema’s voor alle componenten. Deze zijn opgesplitst vanwege de leesbaarheid.
Aansluitschema luidspreker + versterker + microfoon
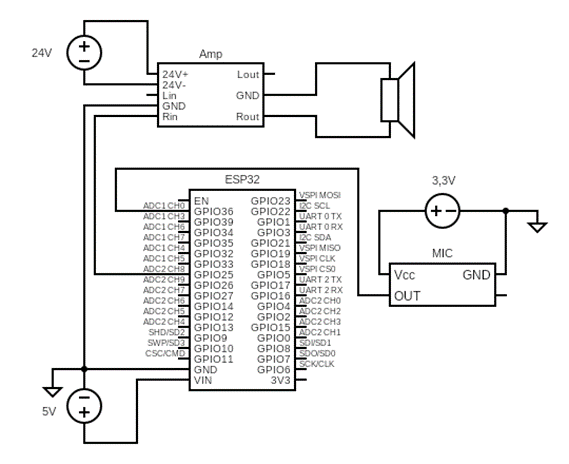
Figuur 4 13 Aansluitschema elektronica deel 1
Aansluitschema LIDAR + Rotary Encoder + LCD
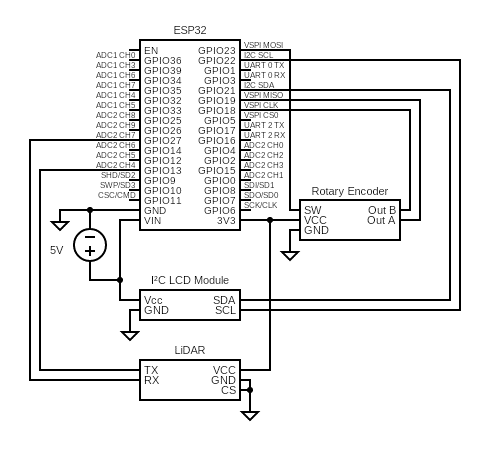
Figuur 4 13 Aansluitschema elektronica deel 2
4.7. Opgelopen problemen
4.7.1. Dichting

Figuur 4 15 Dichting
Een eerste probleem dat we ondervonden was dat de dichting die we gevonden hadden niet de correcte was voor onze toepassing. De dichting liet water door en was ook niet luchtdicht. De soort dichting die we hadden gebruikt is een dichting om kabels ergens door te laten lopen. Na samenspraak met een leerkracht zijn we tot de conclusie gekomen dat we beter kiezen voor een Asafdichting met keuze type-A of type-B. Type-A is zonder een slipstrook. De slipstrook is overbodig voor onze opstelling. Het maakt de motor moeilijk om de buis erdoor te verplaatsen, terwijl het zonder slipstrook ook luchtdicht is.
4.7.2. Ontladen condensatoren
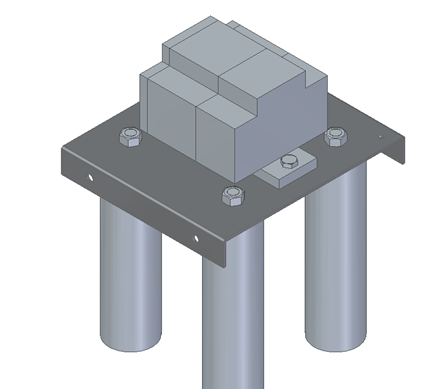
Figuur 4 16 Opstelling ontlading condensatoren
Na het toepassen van de Steinmetzschakeling lagen de condensatoren gevaarlijk bloot. Na een experiment met de vacuümpomp moesten we elke keer elke condensator afzonderlijk ontladen. Als we dit niet deden, kon iemand die per ongeluk in aanraking kwam, geëlektrocuteerd worden omdat ze nog geladen waren. Daarom moesten we een systeem bedenken om de condensatoren automatisch te ontladen. Hier ziet u de oplossing voor het ontladen van de condensatoren. We hebben een plaat ontworpen die de aardingspoorten van de condensatoren verbindt met de plaat. Natuurlijk moeten we de stalen plaat ook ontladen. Dat kan aan de hand van een aarding lus die we aansluiten op de aarding van de bron. Hoe het verwerkt zit in onze proef ziet u bij het deeltje principe.
4.7.3. DC-motor
Op het einde van het schooljaar stootten we op het probleem dat de DC-motor niet sterk genoeg is om de microfoon in- en uit te schuiven. Aangezien dit probleem zich pas laat in het jaar stelde, hebben we besloten om andere problemen voorrang te geven en het in- en uitschuiven van de motor handmatig te doen. De aansluiting voor de DC-Motor is wel voorzien.
Deze aansluiten bleek echter moeilijker te zijn dan eerst gedacht. Oorspronkelijk hadden we geopteerd voor een H-brug. Dit omdat we zowel de richting als de snelheid van de motor wilden regelen. Dit werkte niet omdat de H-brug die wij gebruikten bestaat uit 4 MOSFETs. Ideaal gezien is R_(drain source)=0. Dit was niet het geval omdat er in de werkelijkheid toch een weerstand is tussen drain en source.
De weerstand tussen drain en source zorgde ervoor dat er een spanning ontstond over deze MOSFET (zie onderstaande figuur). Normaal gezien is deze verwaarloosbaar klein, maar omdat we werken met een DC-Motor met een spanning op 5 V, bleek deze toch groot genoeg. Hierdoor kwam er een te lage spanning te staan over de motor waardoor deze niet meer werkte.

Figuur 4 17 H-brug
Nu is er echter nog een schakelaar waarover geen spanningsval ontstaat, namelijk een relais. Hiermee hebben we volgende schakeling gemaakt (zie figuur 3-18). IN_a en IN_b worden gebruikt om de richting van de motor in te stellen. Verder is ook nog een MOSFET bijgevoegd die ervoor zorgt dat we de motor met PWM kunnen sturen. Deze kunnen we bedienen met de Enable pin.

Figuur 4 18 Relais en motor
4.7.4. ESP32
Op aanraden van de leerkracht elektronica hebben we eerst geprobeerd om te werken met het DMA-blok die aanwezig is op de ESP. DMA staat voor direct memory acces. We hebben dit geprobeerd omdat we dachten dat het continu uitlezen van de poort via de gebruikelijke arduinocode te traag zou zijn. De DMA stelt ons in staat om de uitgelezen waarden direct op te slaan in het geheugen, zonder eerst bij de processor te passeren. Dit zorgt ervoor dat we met een veel grotere nauwkeurigheid kunnen meten.
Echter bleek het instellen van de DMA zeer moeilijk te zijn. Vooral het bijhouden van tijd bleek enorm moeilijk te zijn. Na een paar maanden zoeken hebben we besloten om een beetje in te boeten op precisie en met ons oorspronkelijk idee aan de slag te gaan.
Het oorspronkelijke idee was om de interne klok van de microcontroller te gebruiken. Deze begint namelijk te tellen zodra de microcontroller wordt ingeschakeld. Door de klokwaarde op te slaan op het moment dat we een geluidspuls uitzenden en opnieuw wanneer we een geluidspuls ontvangen, kunnen we hieruit het tijdsverschil tussen het uitzenden van de geluidspuls en het ontvangen ervan meten. Dit bleek zeer goed te werken en we hoefden nauwelijks in te boeten op precisie.
5. Metingen en resultaten
5.1. Geluidssnelheid onder atmosferische druk
Zoals eerder vermeld, meten we het tijdsinterval dat geluid nodig heeft om van de luidspreker naar de microfoon te reizen. Hiervoor gebruiken we de interne klok van de microcontroller, die begint te tellen zodra de microcontroller wordt ingeschakeld. Door de klokwaarde op te slaan op het moment dat we een geluidspuls uitzenden en opnieuw wanneer we de geluidspuls ontvangen, kunnen we het tijdsverschil berekenen tussen het uitzenden en het ontvangen van de puls.
Deze meting hebben we verschillende malen herhaald, telkens op een andere afstand.
| Tu (Uitgezonden) | T0 (Ontvangen) | Afstand |
|---|---|---|
| 3 568 965 | 3 571 419 | 833 |
| 8 783 145 | 8 785 810 | 903 |
| 11 985 347 | 11 987 761 | 814 |
| 17 876 136 | 17 878 323 | 759 |
5.2. Geluidssnelheid bij variërende druk
Oorspronkelijk was het de bedoeling dat we ook de geluidssnelheid maten bij een variërende druk. Doordat we moeilijkheden hadden bij het programmeren van de microcontroller, hebben we veel tijd verloren. Hierdoor zijn we er niet in geslaagd om de proef atmosferisch af te sluiten, en kunnen we dus ook geen metingen doen bij variërende druk.
Volgens de theorie is de snelheid van het geluid in een gas gelijk aan:
\(v_{gas} = \sqrt{\frac{c_p \cdot p}{c_v \cdot ρ}} \)
De snelheid van geluid is recht evenredig met de vierkantswortel van de druk als de temperatuur constant blijft. Dit betekent dat de geluidssnelheid toeneemt als de druk toeneemt en afneemt als de druk daalt. Dit kunnen we uitleggen met behulp van het deeltjesmodel.
Geluid heeft een medium nodig om zich te verplaatsen, en de eigenschappen van dit medium beïnvloeden de geluidssnelheid. Bij lagere druk zijn er minder deeltjes in een bepaald volume en/of bewegen deze deeltjes langzamer. Hierdoor geven ze energie minder efficiënt door, wat resulteert in een lagere geluidssnelheid. Bij hogere druk zijn er meer deeltjes en/of bewegen ze sneller, waardoor energie efficiënter wordt overgedragen en de geluidssnelheid toeneemt.
Kortom, de druk van een gas beïnvloedt de geluidssnelheid doordat het de dichtheid en snelheid van de moleculen in het medium verandert. Dit beïnvloedt hoe efficiënt de deeltjes energie aan elkaar doorgeven en dus ook hoe snel het geluid zich kan voortplanten.
6. Berekeningen
6.1. Bepalen van geluidssnelheid
Om de geluidssnelheid te bepalen gebruiken we de formule voor snelheid:
\(v_{geluid} = \frac{s}{\Delta t}\)
Waarbij:
\(\Delta t = t_0 - t_u \)
\(\Delta t = 3 471 419 µs - 3 568 965 µs\)
\(\Delta t = 2 454 µs\)
We weten dat de afstand van de luidspreker tot aan de microfoon gelijk is aan 833 mm.
Vullen we nu de formule voor snelheid in:
\(v_{geluid} = \frac{833 mm}{2454 µs} \)
\(v_{geluid} = 339.45 m/s ≈ 343 m/s\)
We hebben deze test verschillende malen herhaald, telkens met een andere afstand. Op analoge wijze konden we volgende resultaten bekomen:
| Afstand (mm) | ΔT (µs) | Snelheid (m/s) |
|---|---|---|
| 903 | 2665 µs | 339 |
| 814 | 2414 µs | 337 |
| 759 | 2187 µs | 348 |
Uit deze waarden berekenen we vervolgens een gemiddelde:
\(v_{gem} = \frac{339 m/s + 339 m/s + 337 m/s + 348 m/s}{4} \)
\(v_{gem} = 340,75 m/s\)
7. Vaststellingen en besluit
We zien dat de geluidssnelheid die gemeten is met deze proef overeenstemt met wat de theorie beweert. We zien ook dat de geluidssnelheid constant blijft over verschillende afstanden. Toch constateren we enige afwijkingen in de resultaten, wat te wijten is aan de minder nauwkeurige meetmethoden die we hebben gebruikt.
8. Reflectie
We hebben in het begin van het jaar redelijk wat doelstellingen op onze vork genomen. Na beraad hebben we een paar van die doelstellingen moeten laten vallen zodat het haalbaar bleef om dit te doen in 1 schooljaar, waardoor de bedoeling om de snelheid te meten in water is weggevallen. Het meten in luchtdruk is niet gelukt doordat de compensatie voor de luchtlekken te klein was. Theoretisch gezien klinkt alles haalbaar, maar praktijk en theorie liggen ver uit elkaar, dat is een les die we zullen meenemen naar onze verdere schoolcarrière. De samenwerking zat wel goed. We hadden elk onze delen die we moesten voltooien en als er iemand een probleem had probeerden we elkaar optimaal te helpen.